1. Технічні характеристикимотор EVTOL
In розподілений електричнийПривод, двигуни керують декількома гвинтами або вентиляторами на крилах або фюзеляжі, щоб сформувати систему приводу, яка забезпечує тягу до літака. Щільність потужності двигуна безпосередньо впливає на потужність корисної навантаження літака. Потужність потужності, надійність та адаптованість навколишнього середовища двигуна є важливими факторами для визначення динамічних характеристик та безпеки електричного літака. Вибір електромобілів, безпілотників та моторів EVTOL відрізняється через різні витрати, сценарії застосування та інші причини [1].

(Джерело фотографій: Офіційний веб -сайт мережі/SAFRAN)
1) Електромобілі: Більш постійний магнітсинхронні двигуни,Постійні магнітні двигуни з більш високою ефективністю та більш високим крутним моментом можуть забезпечити кращий досвід водіння. У той же час, висока щільність постійних магнітних двигунів також може допомогти електромобілям отримати більш високу потужність при одному об'ємі.
(2) БПЛА: Зазвичай використовується безщірДвигун постійного струму.Двигун DC безщірки має низьку вагу та шум, а вартість технічного обслуговування низька, що підходить для вимог до польоту БПЛА; По-друге, швидкість безщільного двигуна постійного струму вища, що підходить для швидкісних потреб польоту безпілотників. Наприклад, DJI використовує безчесні двигуни.
(3) EVTOL: більш високі вимоги до ефективності двигуна та щільності крутного моменту, постійний магнітний синхронний двигун є дуже перспективним рішенням для електричної силової сили приводу, оскільки в осьовий поточний постійний магнітний двигун має високу швидкість використання радіального простору, а щільність потужності та щільність крутного моменту має переваги у випадку невеликого відношення діаметра діаметри. Поточні електричні літаки VTOL, такі як Joby S4 та Archer Midnight, всі приймають постійні синхронні двигуни магніту [1].
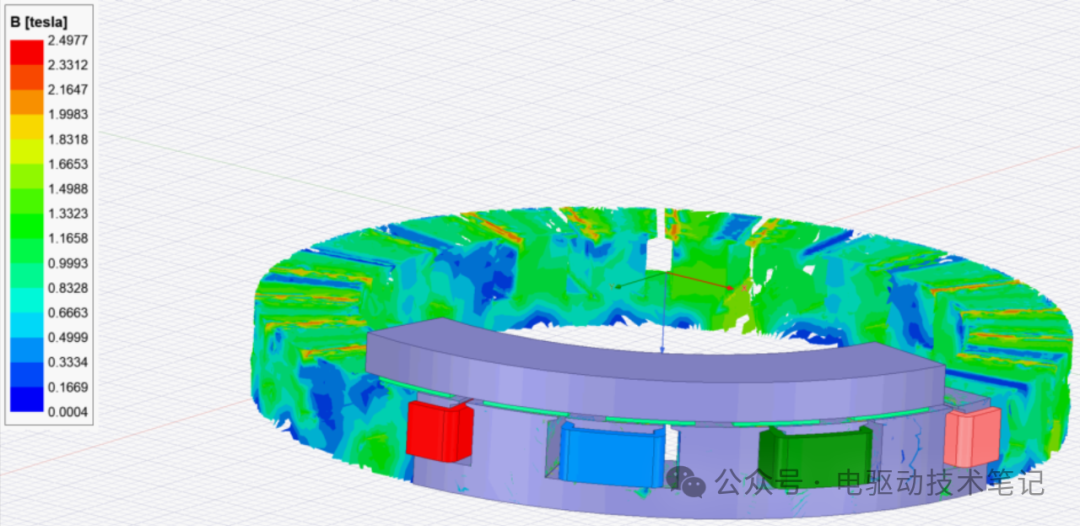
На наступному малюнку показано хмарне зображення фіксованого ротора магнітна інтенсивність інтенсивності однокаторового однокласного осьового двигуна потоку
Наступне малюнок - це порівняння параметрів електричного літака та електромобілів

2. ЕВТОЛ ДОСЛІДЖЕННЯ РОЗВИТОК
В даний час основна тенденція розвитку енергетичної системи EVTOL полягає у зменшенні ваги моторної структури та допоміжної ваги системи охолодження за рахунок вдосконалення електромагнітної технології проектування, технології теплового управління та легкої технології та постійно покращує щільність потужності двигуна та потужність потужності широкого діапазону змінних умов. Відповідно до "Дослідження та розробки літаючих автомобілів та ключових технологій", двигун авіаційного руху вдалося здійснити номінальну щільність потужності тіла двигуна більше 5 кВт/кг, використовуючи ізоляційні матеріали з більш високими температурними обмеженнями, постійними матеріалами магніту з більшою магнітною енергією та легшими структурними матеріалами. Поліпшуючи електромагнітну конструкцію двигуна, наприклад, використання магнітного масиву Халбаха, жодної структури залізного ядра, Litz Dire WIRE та інших технологій, а також покращення дизайну розсіювання тепла, очікується, що номінальна щільність потужності моторного тіла може досягти 10 кВт/кг у 2030 році, а оцінка потужності перевищить 13 кг/кг в 2035 [1].

3. Порівняння чистих електричних та гібридних маршрутів
Порівняно з чистим електричним маршрутом та гібридним маршрутом, від поточного вибору відповідних виробників, внутрішній проект EVTOL в основному базується на чистому електричному схемі, обмеженому енергетичною щільністю літій-іонних акумуляторів, а ємність з низькою пасажиром є найкращим місцем посадки чистої технології електромобілів. За кордоном деякі виробники заздалегідь виклали гібридний план і взяли на себе лідерство в декількох раундах тестування та ітерації. Як видно з наступної таблиці, гібридна схема, очевидно, сильніша за кутом витривалості і може досягти більшої кількості застосувань у сценарії відстані середньої та низької висоти в майбутньому [1].
Час посади: 27-2025 лютого